Эффективное решение задач оптимального управления часто требует значительных вычислительных ресурсов, особенно при росте размерности. Данное исследование "Exploiting Parallelism in a QPALM-based Solver for Optimal Control" предлагает оптимизацию алгоритма QPALM-OCP, основанную на распараллеливании и векторизации вычислений.
Реализация на C++ с применением OpenMP демонстрирует существенное ускорение решения задач линейно-квадратичного оптимального управления против оригинального QPALM. Каковы перспективы дальнейшей оптимизации QPALM-OCP и его применения к более сложным задачам?
Преодолевая границы оптимального управления: скорость и эффективность
Решение задач линейно-квадратичного оптимального управления критично для современных робототехнических и управляющих систем, но требует больших ресурсов. Традиционные подходы часто неэффективны для масштабных задач, ограничивая их применение в сложных сценариях. Повышение скорости и эффективности требует инновационных алгоритмов и оптимизированных реализаций.
Особенно важен учет разреженности, присущей многим практическим задачам управления, когда большинство параметров системы влияет слабо. Использование этой особенности позволяет снизить вычислительную нагрузку и добиться более быстрого и точного управления.
Современный подход к оптимальному управлению: QPALM-OCP
Алгоритм QPALM-OCP решает задачи оптимального управления, используя метод дополненной лагранжевой функции для эффективного решения задач оптимизации с ограничениями. Ключевая инновация — поэтапная параллелизация вычислений с помощью OpenMP, распределяющая нагрузку между процессорами для увеличения скорости.
Для решения подзадач применяется специализированная реализация метода Ньютона, адаптированная к обобщенному гессиану. Дополнительный прирост производительности дает компактный формат хранения данных, улучшающий локальность и позволяющий эффективно использовать SIMD-инструкции (одновременную обработку нескольких данных), ускоряя обработку.
Оценка Производительности и Сравнение с Существующими Методами
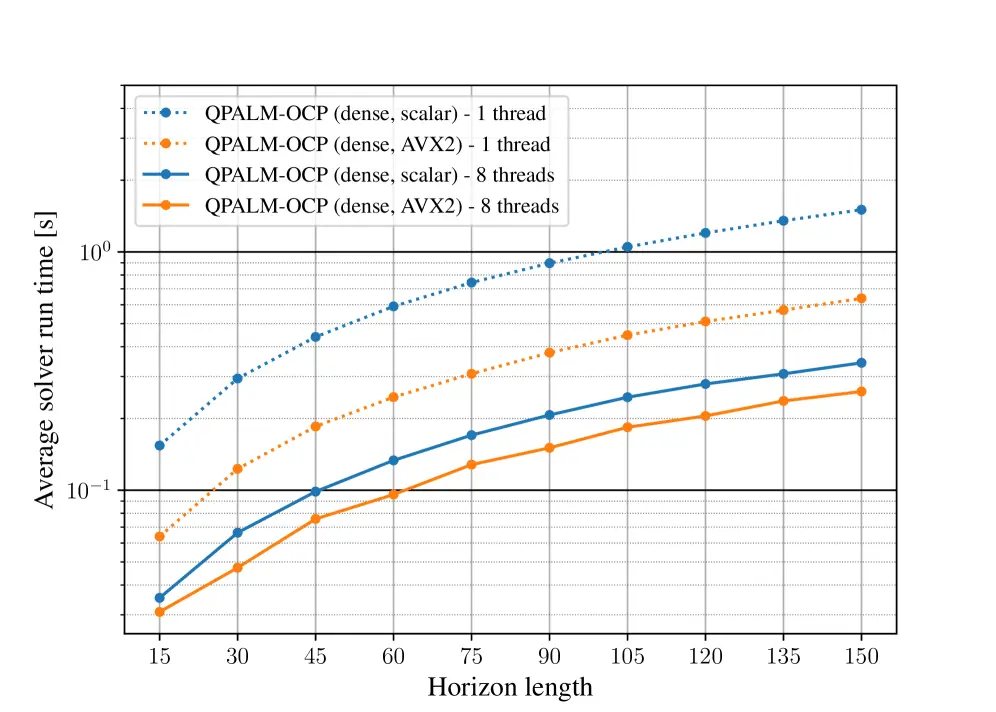
Эффективность QPALM-OCP оценивалась на стандартных бенчмарках: Spring-Mass, QUADCMPC, LIPMWALK. Результаты показывают превосходство QPALM-OCP над существующими подходами, особенно для масштабных задач. На бенчмарке Spring-Mass достигнуто ускорение до 29 раз против QPALM с плотными блоками данных.
Высокая производительность достигнута благодаря реализации алгоритма с применением библиотек BLIS Framework и Intel MKL, использованию разреженности данных и параллельных вычислений. Подтвержденное применение AVX2-векторизации дало дополнительное ускорение до 2.3 раза без потери точности. На тесте LIPMWALK QPALM-OCP показал время решения 0.43 миллисекунды, заметно опережая стандартный QPALM с его 0.46 миллисекунды. Это демонстрирует эффективную оптимизацию даже для задач с малым объемом данных.
Открытие новых горизонтов: Возможности и перспективы QPALM-OCP
Алгоритм QPALM-OCP демонстрирует выдающуюся скорость и масштабируемость. Он позволяет управлять сложными роботизированными системами в реальном времени и оптимизировать масштабные процессы. Преодолевая вычислительные ограничения, эта разработка открывает захватывающие перспективы для исследований в автономной навигации и динамическом распределении ресурсов. Будущие усилия могут расширить возможности QPALM-OCP для работы с нелинейными динамическими системами и внедрить методы машинного обучения для адаптивного управления. Модульная конструкция алгоритма упрощает интеграцию с существующими системами управления и позволяет проводить дальнейшую оптимизацию через аппаратное ускорение. Это делает его мощным инструментом для широкого спектра приложений, требующих быстрого и эффективного управления сложными процессами.
Исследование подчеркивает важность глубокого понимания структуры задач для достижения пиковой производительности. Оптимизации, такие как векторизация и параллелизация с OpenMP, направлены на согласование структуры алгоритма с архитектурой вычислительной системы. Как говорил Пьер Кюри: "Я не верю в счастливые случаи; я верю в подготовленные умы". Этот принцип ярко отражен в подходе статьи, где тщательный анализ и систематическая оптимизация значительно повысили эффективность решения задач линейно-квадратичного оптимального управления.
Куда же дальше?
Оптимизации алгоритма QPALM-OCP, особенно векторизация и параллелизация через OpenMP, показывают: прирост производительности не абсолютен и зависит от того, насколько удачно структура алгоритма соответствует архитектуре системы. Ошибка в модели — не проблема, а сигнал пересмотреть подход к представлению и обработке данных. Ключ не в простом "ускорении" решения, а в понимании оптимальной организации вычислительного процесса.
Важно отметить, что параллелизация, будучи эффективной, имеет свои границы применения. Рост числа ядер процессора не всегда ведет к пропорциональному сокращению времени вычислений, особенно для крупных задач. Ограничения, связанные с передачей данных и синхронизацией потоков, неизбежны. Поэтому перспективные исследования могут сосредоточиться на создании алгоритмов, изначально спроектированных для параллельного выполнения и минимизирующих межпотоковое взаимодействие. Это открывает широкие возможности для новых прорывов.
Понимание структуры оптимального управления как адаптивной системы открывает захватывающие перспективы! Ключевым шагом вперед станет внедрение методов машинного обучения для автоматической подстройки параметров алгоритма QPALM-OCP под конкретные задачи.
Будущее: Самообучающаяся Оптимизация
Такой подход знаменует переход от трудоемкой ручной настройки к интеллектуальной, самонастраивающейся системе. Эта прорывная технология обеспечит легкую адаптацию к самым разным сценариям и позволит извлекать максимальную пользу из имеющихся вычислительных мощностей.
Умная оптимизация параметров методами машинного обучения — наше завтра. Она даст алгоритму QPALM-OCP свободу от рутины настройки, возможность самостоятельно настраиваться под уникальные особенности любой задачи и полностью реализовать потенциал доступных вычислительных ресурсов. Будущее систем управления выглядит невероятно перспективным!
Источник: naked-science.ru





